Resources
Source code, models, sim
Every repo Hyperspawn maintains, plus the upstream sim + ROS infrastructure that the platform builds on. The AI assistant indexes all of these for grounded answers.
Hyperspawn
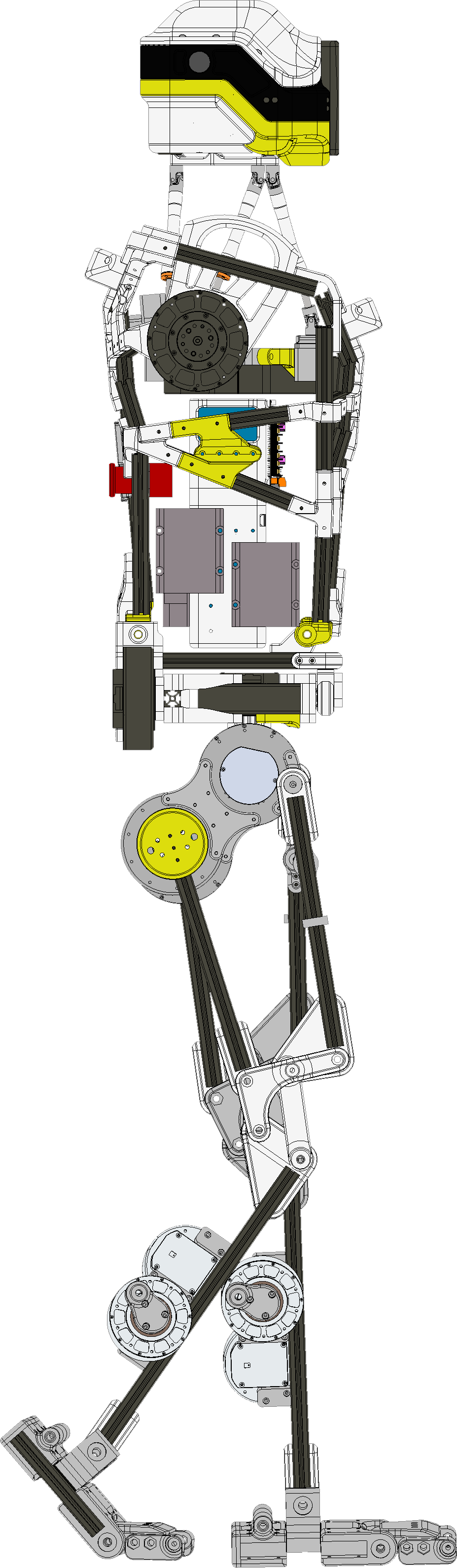
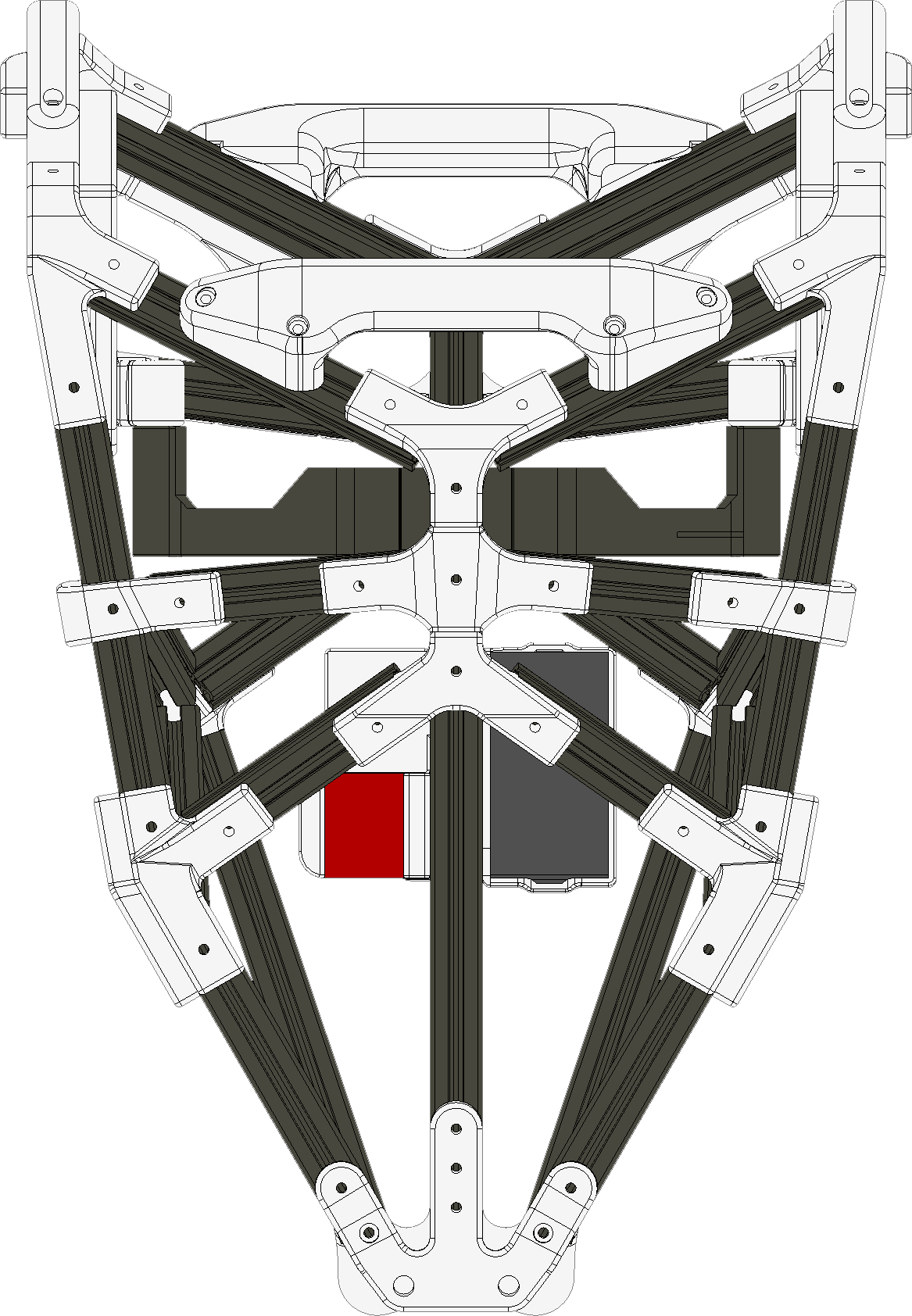
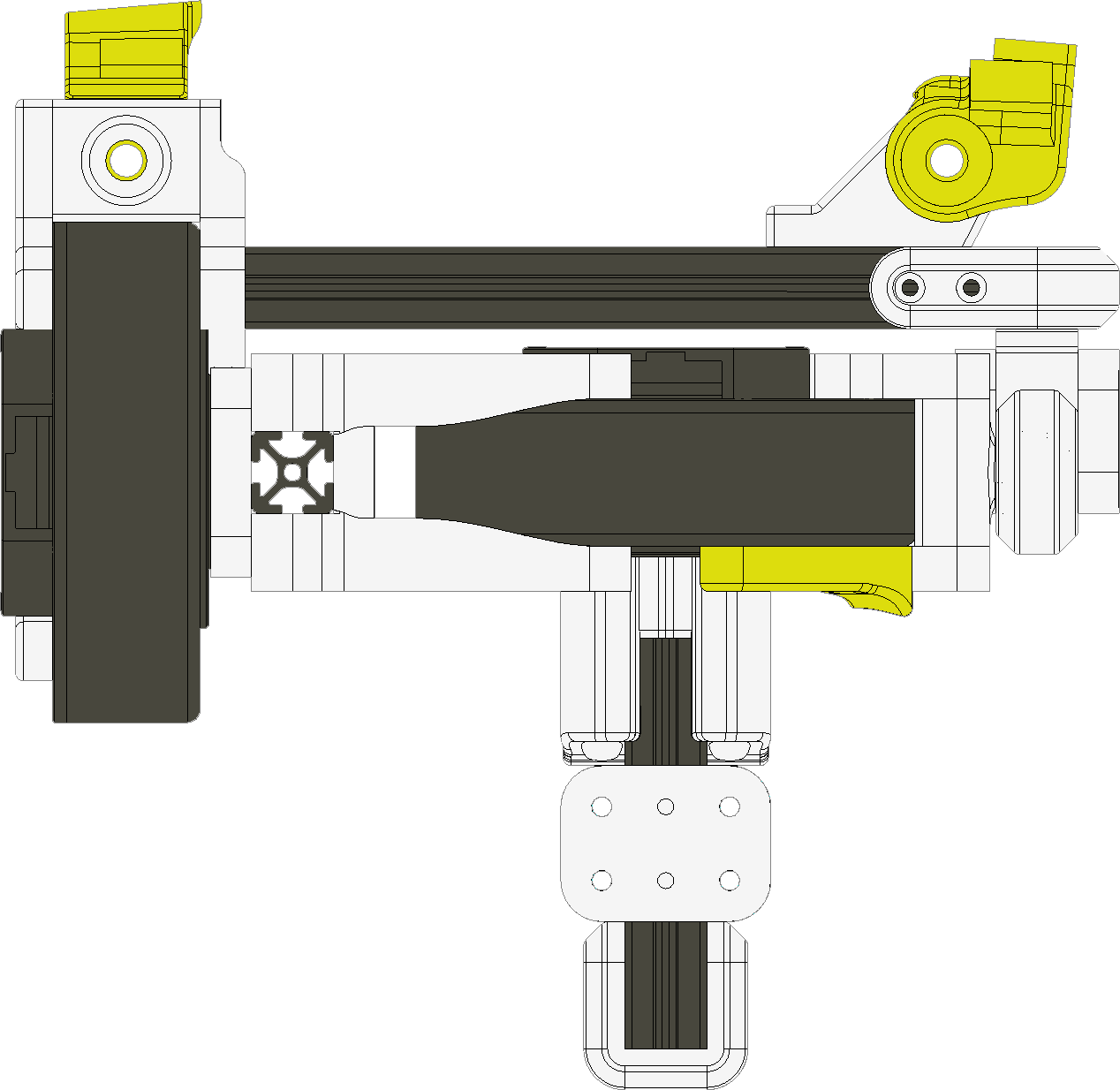
dropbear_hardware
Full CAD assembly + subassemblies (Fusion, STEP, STL, USDZ)
CAD
dropbear_printables
Printable STLs + slicer plates + print settings
CAD
dropbear_urdf
URDFs + meshes (granular and modular)
URDFXML
dropbear_mjcf
MuJoCo MJCF files for Python simulation
MJCFXML
dropbear_ros
ROS 2 package for control + communication
ROSPython · C++
dropbear_rviz
RViz UI + sliders for joint manipulation
ROSPython
External
Useful elsewhere
Docs and standards we reference when authoring sessions: